
96531706 SD & direct boost, JDM MAP sensor upgrading to OmniPower 4bar questions
 Dec 21, 2009, 08:49 PM
Dec 21, 2009, 08:49 PM
#1

96531706 SD & direct boost, JDM MAP sensor upgrading to OmniPower 4bar questions
Looking for some feedback:
So my initial thought is to go in and change the scaling of the MAP sensor, swap it in, and be done with it, but looks like with 9653xxx6 I'm SOL and will basically have to re-tune my SD VE tables, then rescale the direct boost scalings (and then re-do the tables) for proper boost control?
Step one: getting VE correct. JB said to just use 1:1 on both VE tables, which jives with what he has posted in the past. This should get the car driving, disable error correction and get boost/afr back to where I want it.
Step two: change my scalings to match mrfred's 4-bar settings in this thread:
https://www.evolutionm.net/forums/ec...t-control.html
<scaling name="BoostErrorPsi" units="psi" toexpr="(x-128)/(8*4.23)" frexpr="x*8*4.23+128" format="%.1f" min="-3.8" max="3.8" inc="0.1" storagetype="uint16" endian="big"/>
<scaling name="OffsetWGDC" units="WGDC Change" toexpr="(x-128)/2" frexpr="x*2+128" format="%.1f" min="-64" max="63.5" inc="0.5" storagetype="uint8" endian="big"/>
<scaling name="psia16" units="psia" toexpr="x/(4.23*2)" frexpr="x*(2*4.23)" format="%.1f" min="0" max="32" inc="0.1" storagetype="uint16" endian="big"/>
<scaling name="psia8" units="psia" toexpr="x/(4.23*2)" frexpr="x*(2*4.23)" format="%.1f" min="0" max="30.1" inc="0.1" storagetype="uint8" endian="big"/>
Then update the values in evoscan:
0.2369*x-b
per this thread:
https://www.evolutionm.net/forums/ec...evo-8-9-a.html
log, turn on error correction, and should be back in business.
Am I on the right track here?
***edit***
I was on the right track, but the scalings are already included in phenem's default XML that comes with 96531706, but a key component I missed that ended up being a big deal (and would have made this painless) is the kPa MAP 16-bit scaling:
Once I changed this and put my original values in there, it was absolutely painless.
So my initial thought is to go in and change the scaling of the MAP sensor, swap it in, and be done with it, but looks like with 9653xxx6 I'm SOL and will basically have to re-tune my SD VE tables, then rescale the direct boost scalings (and then re-do the tables) for proper boost control?
Step one: getting VE correct. JB said to just use 1:1 on both VE tables, which jives with what he has posted in the past. This should get the car driving, disable error correction and get boost/afr back to where I want it.
Step two: change my scalings to match mrfred's 4-bar settings in this thread:
https://www.evolutionm.net/forums/ec...t-control.html
<scaling name="BoostErrorPsi" units="psi" toexpr="(x-128)/(8*4.23)" frexpr="x*8*4.23+128" format="%.1f" min="-3.8" max="3.8" inc="0.1" storagetype="uint16" endian="big"/>
<scaling name="OffsetWGDC" units="WGDC Change" toexpr="(x-128)/2" frexpr="x*2+128" format="%.1f" min="-64" max="63.5" inc="0.5" storagetype="uint8" endian="big"/>
<scaling name="psia16" units="psia" toexpr="x/(4.23*2)" frexpr="x*(2*4.23)" format="%.1f" min="0" max="32" inc="0.1" storagetype="uint16" endian="big"/>
<scaling name="psia8" units="psia" toexpr="x/(4.23*2)" frexpr="x*(2*4.23)" format="%.1f" min="0" max="30.1" inc="0.1" storagetype="uint8" endian="big"/>
Then update the values in evoscan:
0.2369*x-b
per this thread:
https://www.evolutionm.net/forums/ec...evo-8-9-a.html
log, turn on error correction, and should be back in business.
Am I on the right track here?
***edit***
I was on the right track, but the scalings are already included in phenem's default XML that comes with 96531706, but a key component I missed that ended up being a big deal (and would have made this painless) is the kPa MAP 16-bit scaling:
Quoted from first page of mrfred's 'links to jcsbanks' SD patches' thread:
<!-- ** OMNI 4 bar ** -->
<scaling name="MAP 16bit" units="kPa" toexpr="x*0.4072" frexpr="x/0.4072" format="%.1f" min="0" max="450" inc="0.4072" storagetype="uint16" endian="big"/>
<!-- ** OMNI 4 bar ** -->
<scaling name="MAP 16bit" units="kPa" toexpr="x*0.4072" frexpr="x/0.4072" format="%.1f" min="0" max="450" inc="0.4072" storagetype="uint16" endian="big"/>
Last edited by scheides; Jan 12, 2010 at 07:51 AM.
 Dec 21, 2009, 09:52 PM
Dec 21, 2009, 09:52 PM
#2
I was under the impression the scalings included with phenem's and bank's effort for the xml was good enough for boost control.
All you should have to do is right click the table and change the scaling to one of the canned omni 4 bar ones. Then you just adjust your table back to the corrected values and call it a day. Shouldn't take that long to swap out the default scaling to the correct omni 4 bar.
Beats messing with the default scaling if you want to go back as well.
All you should have to do is right click the table and change the scaling to one of the canned omni 4 bar ones. Then you just adjust your table back to the corrected values and call it a day. Shouldn't take that long to swap out the default scaling to the correct omni 4 bar.
Beats messing with the default scaling if you want to go back as well.
Dec 22, 2009, 06:22 AM
#3
*hug* I didn't even notice that there were alternate scalings included! Default is PSIa8 JDM3barMAP and yea, I'll just switch to PSI8 OMNI4barMAP, update EvoScan, and go nuts.
Just to confirm: all of my VE tables will need to change/be re-tuned, right?
Just to confirm: all of my VE tables will need to change/be re-tuned, right?
Dec 22, 2009, 09:05 AM
#4
If so yes you will need to update your map VE table with new settings the values will change when you update the scaling.
The RPM VE table should be fine on its own likely but you never know some map sensors have some different quirks then others which need to be tuned for.
Dec 22, 2009, 09:30 AM
#5
I'm assuming you had a 3 bar in there yes?
If so yes you will need to update your map VE table with new settings the values will change when you update the scaling.
The RPM VE table should be fine on its own likely but you never know some map sensors have some different quirks then others which need to be tuned for.
If so yes you will need to update your map VE table with new settings the values will change when you update the scaling.
The RPM VE table should be fine on its own likely but you never know some map sensors have some different quirks then others which need to be tuned for.
Yes I'll need to update my map VE table, but those values are not directly related to the scaling changes mentioned above, so it will simply be re-tailoring the VE based on the different scaling/voltage values of the new sensor.
This seems kind of odd to me; why is there no MAP sensor scaling as part of the SD implementation? You'd think you could swap out any sensor for any sensor, and as long as they were each scaled properly, you wouldn't have to re-tune.
Dec 22, 2009, 09:37 AM
#6
Ya, 3bar.
Yes I'll need to update my map VE table, but those values are not directly related to the scaling changes mentioned above, so it will simply be re-tailoring the VE based on the different scaling/voltage values of the new sensor.
This seems kind of odd to me; why is there no MAP sensor scaling as part of the SD implementation? You'd think you could swap out any sensor for any sensor, and as long as they were each scaled properly, you wouldn't have to re-tune.
Yes I'll need to update my map VE table, but those values are not directly related to the scaling changes mentioned above, so it will simply be re-tailoring the VE based on the different scaling/voltage values of the new sensor.
This seems kind of odd to me; why is there no MAP sensor scaling as part of the SD implementation? You'd think you could swap out any sensor for any sensor, and as long as they were each scaled properly, you wouldn't have to re-tune.

Trending Topics
 Dec 22, 2009, 01:03 PM
Dec 22, 2009, 01:03 PM
#9

You guys have a little different tuning style of SD than I do. My style matches more of what John had when he introduced this.
You can see the trends if you multiply your maps out into a 3D chart in Excel or something.
VE is going to be a lot less for map under vacuum (part throttle) than during 0 vac/boost (WOT). So, for my map ve tables. It tapers way down at lower vacuum ranges, then to 1:1 ish at WOT. It makes for a much better correlation to what the VE was when on MAF.
Of course 2 2-D tables aren't perfect for trying to capture a 3-D chart, but if you multiply them out, you will get what I am trying to say.
Edit: Here is what my tables looked like, so you see what I am saying. This is of couse on a stock turbo, with stock exhaust, so VE falls at the higher RPM:
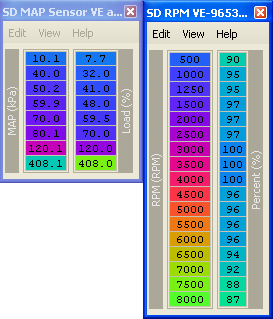
You can see the trends if you multiply your maps out into a 3D chart in Excel or something.
VE is going to be a lot less for map under vacuum (part throttle) than during 0 vac/boost (WOT). So, for my map ve tables. It tapers way down at lower vacuum ranges, then to 1:1 ish at WOT. It makes for a much better correlation to what the VE was when on MAF.
Of course 2 2-D tables aren't perfect for trying to capture a 3-D chart, but if you multiply them out, you will get what I am trying to say.
Edit: Here is what my tables looked like, so you see what I am saying. This is of couse on a stock turbo, with stock exhaust, so VE falls at the higher RPM:
Last edited by l2r99gst; Dec 22, 2009 at 01:21 PM.
Dec 22, 2009, 06:06 PM
#10
Here's what I have so far for my Omni 4-bar. I never really bothered taking the load matching out past 300%/kPa since for now I don't peak over 285-290 right now.
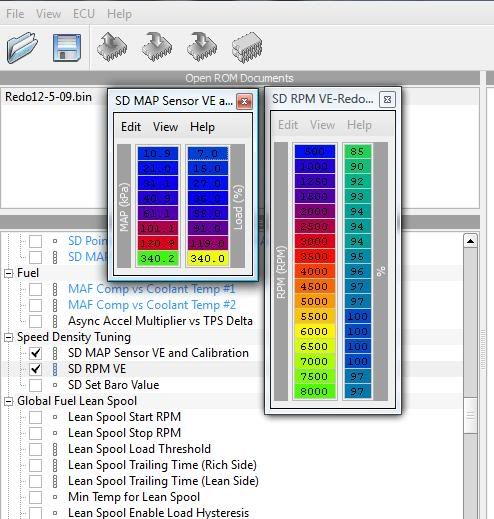
Also, I don't know if it was just me or anyone else had the same issue, but I could never seem to get the PSI-based boost control to work at all. All it ever gave me with any setting was 12psi...plain wastegate pressure. Once I swapped the hex values back to Load-based it works fine, so I left it like that and tuned the load-based tables instead.
Also, I don't know if it was just me or anyone else had the same issue, but I could never seem to get the PSI-based boost control to work at all. All it ever gave me with any setting was 12psi...plain wastegate pressure. Once I swapped the hex values back to Load-based it works fine, so I left it like that and tuned the load-based tables instead.
Last edited by Slo_crx1; Dec 22, 2009 at 06:08 PM.

Thread
Thread Starter
Forum
Replies
Last Post